
A Field Programmable Gate Array (FPGA) is essentially a re-programmable integrated circuit in the form of a chip. The team aims to develop a flight controller of its own using a Field Programmable Gate Array (FPGA). FPGA can carry out various basic operations at the same time without competing for resources. This research is being conducted to make a flight controller which is flexible in utility so that it could be used with a variety of systems.

UAVs capable of aggressive maneuvres to conduct task-specific activities (i.e throwing a ball through a window) along with the ability to fly across heavily constrained and restricted areas (i.e In between circular loops, tree branches, and cable wires). These applications of minimum snap trajectory control will be highly beneficial in conducting multi-variant tasks and rapid collection of Intelligence, Surveillance, and Reconnaissance (ISR) information in the urban areas.
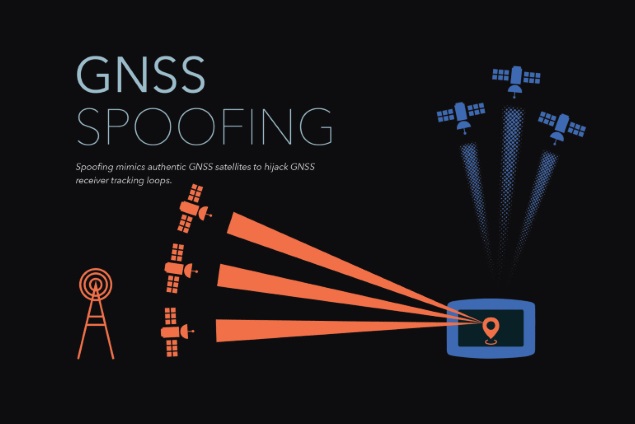
GPS spoofing is an attack in which a radio transmitter located near the target is used to interfere with a legitimate GPS signals. The attacker can transmit no data at all or could transmit inaccurate coordinates. Recently, GPS spoofing attack on UAV has attracted widespread research interests due to the vulnerability of civilian GPS signal. GPS spoofing ensures that the UAV remains undetected and this is useful for UAV used in defense.

A 6DOF Robotic Arm and Unmanned Ground Vehicle (UGV) setup is being developed to revolutionize the field of soft-crop agriculture by automating crop harvesting and management interventions through implementation of visual-based crop detection deep learning models on the setup. The team is further looking forward to implement its existing swarming capabilities to create a swarm of crop harvesting UGV in the later stages of the project.

The crew aims to develop an AI-based integrated system between the UAV and Robotic Arm, capable of object detection, tracking, and pick and drop capabilities (i.e collecting objects from water surfaces, twisting a doorknob, plucking fruit from trees, etc.)

We are working towards equipping our UAVs with Morphing characteristic designs in the near future. The wings of these UAVs would be having the provision to change their shape seamlessly in order to provide optimal performance according to external conditions and also to adapt themselves for mission-specific tasks in order to achieve optimum endurance.